Patent for Automated Control of Drone Swarm Networks

ECE William Lincoln Smith Professor Tommaso Melodia and Associate Research Professor Salvatore D’Oro were awarded a patent for “Software defined drone network control system.”
Abstract Source: USPTO
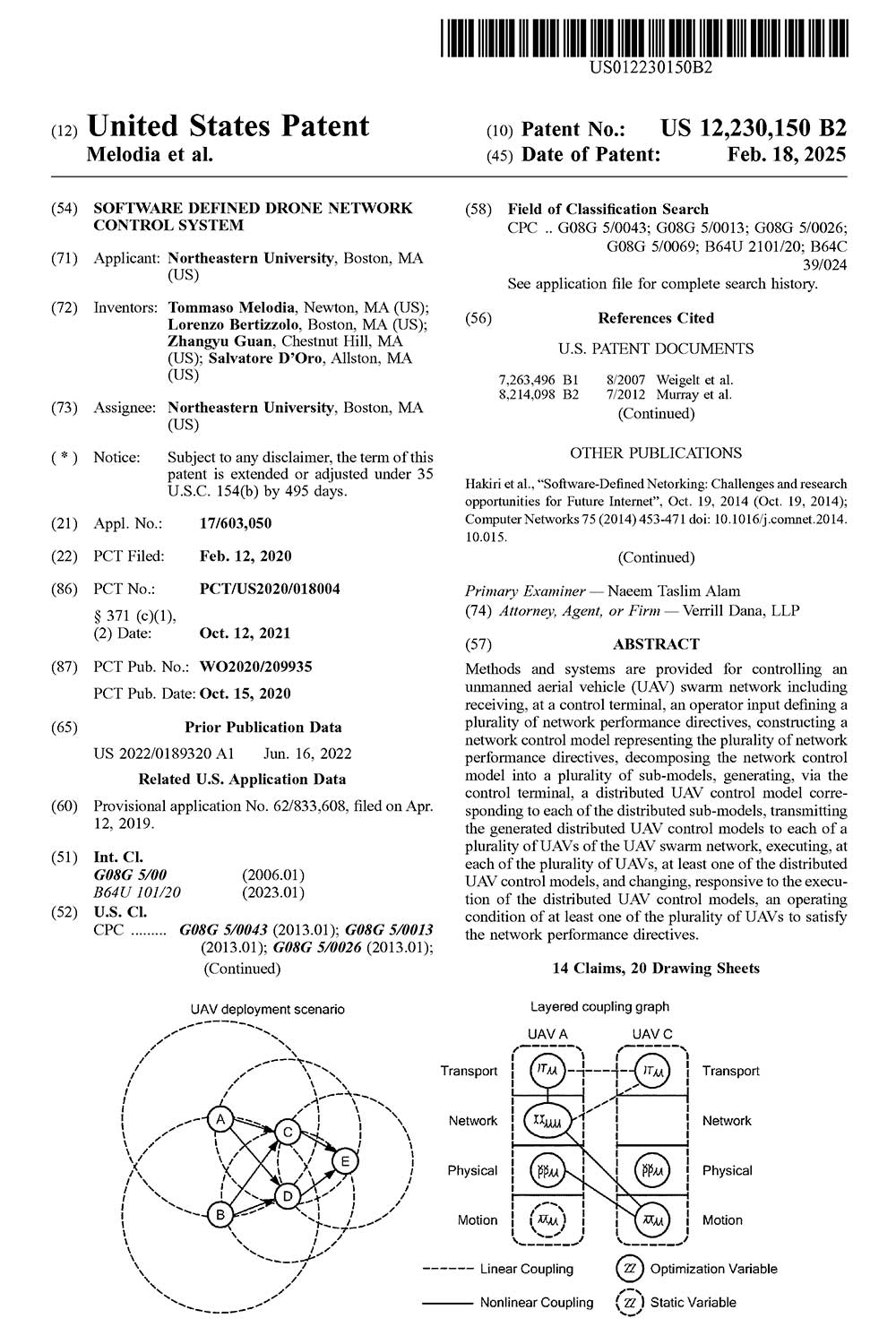
Methods and systems are provided for controlling an unmanned aerial vehicle (UAV) swarm network including receiving, at a control terminal, an operator input defining a plurality of network performance directives, constructing a network control model representing the plurality of network performance directives, decomposing the network control model into a plurality of sub-models, generating, via the control terminal, a distributed UAV control model corresponding to each of the distributed sub-models, transmitting the generated distributed UAV control models to each of a plurality of UAVs of the UAV swarm network, executing, at each of the plurality of UAVs, at least one of the distributed UAV control models, and changing, responsive to the execution of the distributed UAV control models, an operating condition of at least one of the plurality of UAVs to satisfy the network performance directives.