Flying Robots Inspect Infrastructure Damage

CEE Professor & Chair Jerome Hajjar and colleagues from Carnegie Mellon University are working to create autonomous flying robots that will be able to inspect, analyze, and assess any damages to bridges and buildings.
Source: News @ Northeastern
Next month, the contractor for the Massachusetts Department of Transportation expects to begin Stage 4 of construction on the historic Longfellow Bridge, which connects Boston and Cambridge, its iconic “salt and pepper” towers guiding the passage. Will it happen?
Perhaps not now, but soon. Northeastern’s Jerome Hajjar and colleagues at Carnegie Mellon University are developing airborne robots to ensure that in the future such timetables are kept and improvements are razor-sharp.
The team is developing a sophisticated system called the Aerial Robotic Infrastructure Analyst, or ARIA. It uses small low-flying robots known as micro air vehicles, or MAVs, coupled with 3-D imaging and state-of-the art planning, modeling, and analysis to inspect structures such as bridges and buildings and to automatically identify problems, track their progress, and assess the need for follow-up.
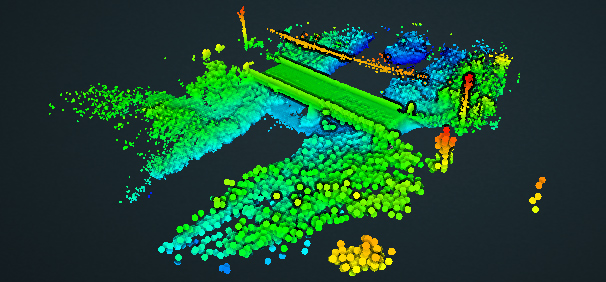
An overview of a 3-D model of a bridge created by the autonomous ARIA robot using its unique sensors. Image by Varun Kasireddy, Carnegie Mellon University
Hajjar is creating the algorithms that will help engineers assess the nature and significance of the damage using the data captured by the MAVs and determine the best course of action.
The MAVs, which are programmed to fly and navigate autonomously, can safely and efficiently address places that are difficult or dangerous to reach as well as those that have to be inspected repeatedly.”
—Jerome Hajjar
“Consider bridge inspections,” says Hajjar, CDM Professor and chair of the Department of Civil and Environmental Engineering. “Until now, they were predominantly done by people with cameras crawling on stretches of scaffolding that would be built for the purpose, taken down, and then reconstructed a little further along the bridge—an expensive process. The MAVs, which are programmed to fly and navigate autonomously, can safely and efficiently address places that are difficult or dangerous to reach as well as those that have to be inspected repeatedly.”
The research is being funded by the National Science Foundation’s National Robotics Initiative.
Taking flight
With their eight rotors splayed, the MAVs look like spiders whirring in the air.
Each MAV measures about 3 or 4 feet across, and is equipped with a lightweight rotating laser scanner that provides 3-D measurements, three video cameras for high-resolution imaging, and a GPS to monitor its position. Onboard wireless communication technology will send data—including 3-D models of structures and their components—back and forth between a tablet operated by an inspector on the ground.
Should the inspector see a problem, he can direct the MAV to overlay its characteristics—location, size, volume, and so on—on the 3-D model and then launch a simulation of how the structure will behave under different conditions to assess the problem’s severity based on DOT criteria.

Jerome Hajjar, CDM Professor and chair of the Department of Civil and Environmental Engineering Photo by Brooks Canaday/Northeastern University
The algorithms being developed by Hajjar determine the nature of the damage—spalls and cracks in concrete, ruptures or corrosion in steel, bends or buckles in members—on a refined level, document that damage so it can be compared with older and future images, and provide a “condition rating,” from “excellent” to “failed,” to guide the monitoring and scheduling of repairs.
“We want to know not simply whether the damage is there but if it matters,” says Hajjar, who specializes in computational simulations, experimental testing, and field investigations of structures. That’s why the simulation is so important. “In the case of a bridge, for example, the system would simulate the behavior of a bridge subjected to loads,” he says. “How much does the bridge deflect under particular loads? How much stress on the members is too much? How will the damage the MAV has detected affect that?”
From inspections to repairs
Next steps include making some fixes as automatic as the inspections. “I think modest repairs are actually quite feasible,” says Hajjar. He cites a steel crack in a bridge as an example. “The most common repair is to drill a hole in the crack tip, which changes what we call the ‘stress concentration’ from infinite, meaning that it’s going to keep propagating, to a much more dulled-out lower-stress version,” he says. “It enables the bridge to handle the fatigue stresses for a much longer time.”
The trick is keeping the MAVs small, so they can inspect every nook and cranny of a structure, while ensuring they are light enough to fly autonomously and still carry the laser scanners, high-resolution cameras, and other equipment required to perform their jobs.
Bridges have proven optimum for field studies because they are public and accessible, says Hajjar. “Every bridge engineer I’ve talked to is excited about the project.”