New Robot Arm created to Help with Mundane Chores
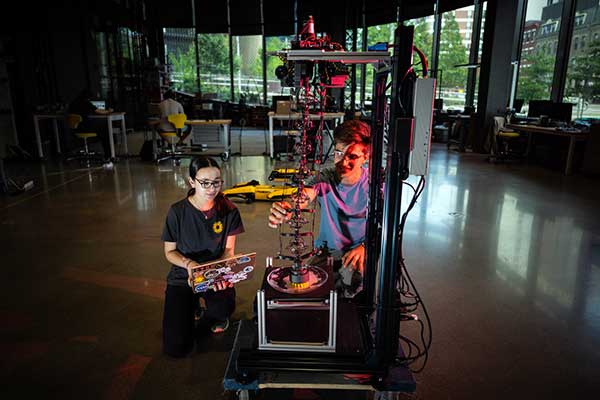
Researchers will present SCCRUB at IEE-RAS International Conference on Soft Robotics in Japan. Photo by Alyssa Stone/Northeastern University
Jakub Kowalewski, PhD, mechanical engineering, MIE Assistant Professor Jeffrey Lipton, and the Transformative Robotics Lab created a novel elephant trunk-like robot arm that has the torque power to clean dishes effectively using a mechanical system called a planetary gearbox.
This article originally appeared on Northeastern Global News. It was published by Cesareo Contreras.
A new elephant trunk-like robotic arm may offer reprieve from dishwashing
There’s a reason doing the dishes consistently ranks highly among the list of chores people hate doing.
The task can be dull, requires you to get dirty and, if you’re at the sink for a long time or often, could cause some health issues.
A new robotic arm that moves like an elephant’s truck from Northeastern University’s Transformative Robotics Lab may offer a solution to escape the chore.
Research from the lab shows the device, aptly named SCCRUB, cleaning up to 99.7% of contaminants from a single dirty glass plate.
SCCRUB, which stands for Surface Cleaning Compliant Robot Utilizing Bristles, is far from the first cleaning robot.
For years, humanoid robots and mobile manipulators (robots that have a mobile base and a single arm that is capable of completing tasks) have been shown spraying and wiping down surfaces. There’s also of course Roomba’s line of cleaning robots and similar devices like it.
But SCCRUB has a unique design for a robot arm and features a series of mechanical connections known as TRUNC, or torsionally rigid universal coupling, cells that make it capable of applying the high and consistent level of torque, or the twisting force, needed for scrubbing down surfaces.
 |
 |
The robot arm features a series of TRUNC, or torsionally rigid universal coupling, cells for torque and flexibly. Photos by Alyssa Stone/Northeastern University
“TRUNC cells are actually something we’ve developed in our lab,” says Jakub Kowalewski, a mechanical engineering doctoral student at Northeastern and one of the main designers of the robot. “Using that, we’ve been able to build this arm that kind of mimics an elephant’s trunk or an octopus’ arm,” he says.
At its end of the robot arm is a counter-rotating scrubbing brush, which the researchers also designed in the lab.
The brush features a specialized mechanical system called a planetary gearbox that allows the brush/scrubber to “press into a surface while resisting the frictional force of the scrubbing,” says Alyssa Ugent, a high school student at Gann Academy in Waltham, Mass. who interned at the Northeastern lab.
Read full story at Northeastern Global News