Robust Navigation and Sensing Technologies for Enhanced Situational Awareness

Helena Calatrava, PhD’28, electrical engineering, has dedicated much of her time and research to investigating ways to mitigate the challenges that threaten situational awareness in air and ground autonomous systems. She aims to strengthen core technologies behind reliable detection and tracking. As adversarial threats evolve, she remains committed to building more resilient next-generation navigation and sensing systems.
Helena Calatrava completed both her undergraduate and master’s studies in Barcelona, Spain, at the Universitat Politècnica de Catalunya. Studying electrical engineering with a concentration in telecommunications systems, Calatrava strengthened her knowledge in signal processing and wireless communications. She said she was drawn to study engineering because she loves how it “beautifully sits at the intersection of structure and creative expression, demanding mathematical rigor and requiring you to find your own path to a solution.”
In Calatrava’s second year of undergraduate studies, she started working in a research laboratory at UPC. Since then, Calatrava has been engrossed in extensive and meaningful research projects across various labs. She thoroughly enjoys working and learning in a research-oriented environment and hopes to pursue post-doctoral studies upon completing her PhD program.

Calatrava collecting real-world data for resilient satellite-based positioning research.
Calatrava is now pursuing her PhD in electrical engineering at Northeastern University, where she works in the Information Processing Lab (IPL), which is a part of the Signal Processing, Imaging, Reasoning and Learning Lab (SPIRAL) under the supervision of Associate Professor Pau Closas. The IPL focuses on GPS navigation, and Calatrava says her research involves statistical and robust signal processing, estimation theory, target tracking and machine learning. She values Professor Closas’s blend of mathematical rigor and application-driven research, which helps her translate theory into practical impact.
Inventive Research at the Center for Signal Processing, Imaging, Reasoning and Learning
While at the IPL, Calatrava has been working on three extensive research projects. The first project centers on advancing robust satellite-based navigation systems. Her work focuses on scenarios where a GPS receiver is under attack or operating during infrastructure outages. Calatrava and her team have developed cooperative differential GPS algorithms capable of delivering centimeter-level accuracy without dependence on physical reference stations for corrections, significantly improving both resilience and cost efficiency.
Calatrava also works on satellite-based environmental monitoring, developing techniques to process space-borne imagery. Her team’s recent paper focuses on land-cover mapping methods that can detect flooding and track deforestation in the Amazon Rainforest.
Calatrava’s third IPL project focuses on protecting radar systems from deception jamming. She explains deception jamming as a technique where adversaries inject fake signals to trick radar into seeing aircraft or drones in the wrong location or moving on false trajectories. To counter this, she is developing multi-target tracking algorithms capable of maintaining accurate real-time surveillance even under adversarial conditions. She has been advancing this work since her second year of PhD studies in collaboration with the U.S. Army Research Lab.
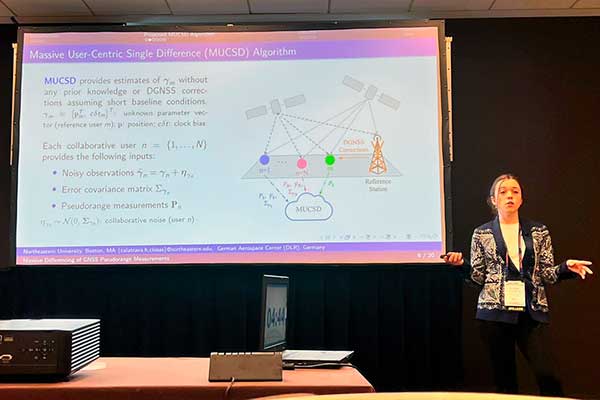
Calatrava presenting her collaborative GNSS research at the IEEE/ION Position, Location and Navigation Symposium (PLANS) 2023.
Calatrava’s latest approach tackles deception-jamming through smarter pattern recognition. Rather than just detecting fake signals, her team’s algorithms now analyze whether a tracked object’s movement makes physical sense. Using an interactive multiple-model framework, the system flags these implausible motion patterns as likely attacks. This builds on her earlier work modeling specific jamming techniques, but offers a more adaptive defense: the tracker learns to recognize deceptive behavior by how targets move, not just by signal characteristics. The advancement represents an important step toward more resilient airspace surveillance systems.

Calatrava and Peng Wu receiving the Best Track Paper Award at IEEE/ION PLANS 2023, alongside their advisor, Professor Pau Closas.
Calatrava has had the opportunity to attend several Institute of Navigation (ION) conferences, including ION GNSS+, to present her incredible research. Additionally, she presented at IEEE/ION PLANS, where Calatrava co-received the Best Track Paper Award for her work on federated learning for jamming classification. Last month, Calatrava gave a webinar talk for the ION on robust satellite-based positioning in the presence of jamming attacks for lightweight technologies under coarse signal quantization. Her talk explored what would happen if you applied a mathematical operation that allows you to protect your receiver with low-cost hardware. The main challenge is working with a constrained number of bits, which limits the characterization of the attack waveform and makes it challenging to counteract powerful jamming attacks. Calatrava and her team are working on a theoretical expansion of this question, which she is very excited about.
Future Perspectives
Calatrava enjoys the research she works on because of its potential for improving our security. She said she feels “very happy that my PhD advances resilient navigation through deeply mathematical work, especially as the number of attacks and events that can disrupt positioning keeps increasing, not only in military contests but also for civilian aviation and drones.” She hopes her research on anti-jamming and deception-mitigation techniques will help improve airspace safety.

Calatrava with labmates Shuo Tang and Mariona Jaramillo, advisor Professor Pau Closas, and collaborator Andrea Bellés from the German Aerospace Center (DLR) at IEEE/ION PLANS 2025.
Calatrava aims to continue exploring this subject further throughout the rest of her PhD program. She wants to look deeper into multiple target tracking using continuous-time signals, which she says would be particularly relevant for hypersonic target tracking and advanced autonomous systems. This is another important extension of her research, to which she has dedicated much of her time.
Currently, she is launching a new research effort on artificial intelligence (AI)-driven GNSS interference monitoring, leveraging transformer architectures capable of modeling long-range temporal dependencies to identify complex interference signatures.
Upon completing her PhD program, Calatrava would like to continue in academia. As she describes, “the journey from undergraduate engineering to doctoral research is a profound personal transformation, both technically and emotionally.” She feels fortunate to have been guided by researchers who were not only at the top of their fields but genuinely committed to mentoring. Inspired by their example, she hopes to one day support future students in the same way, while continuing to advance interference mitigation and robust space technologies.