Patent for Validating MRAC for Human-in-the-Loop Control Systems

MIE Professor Rifat Sipahi was awarded a patent for “Validating and computing stability limits of human-in-the-loop adaptive control systems”.
Abstract Source: USPTO
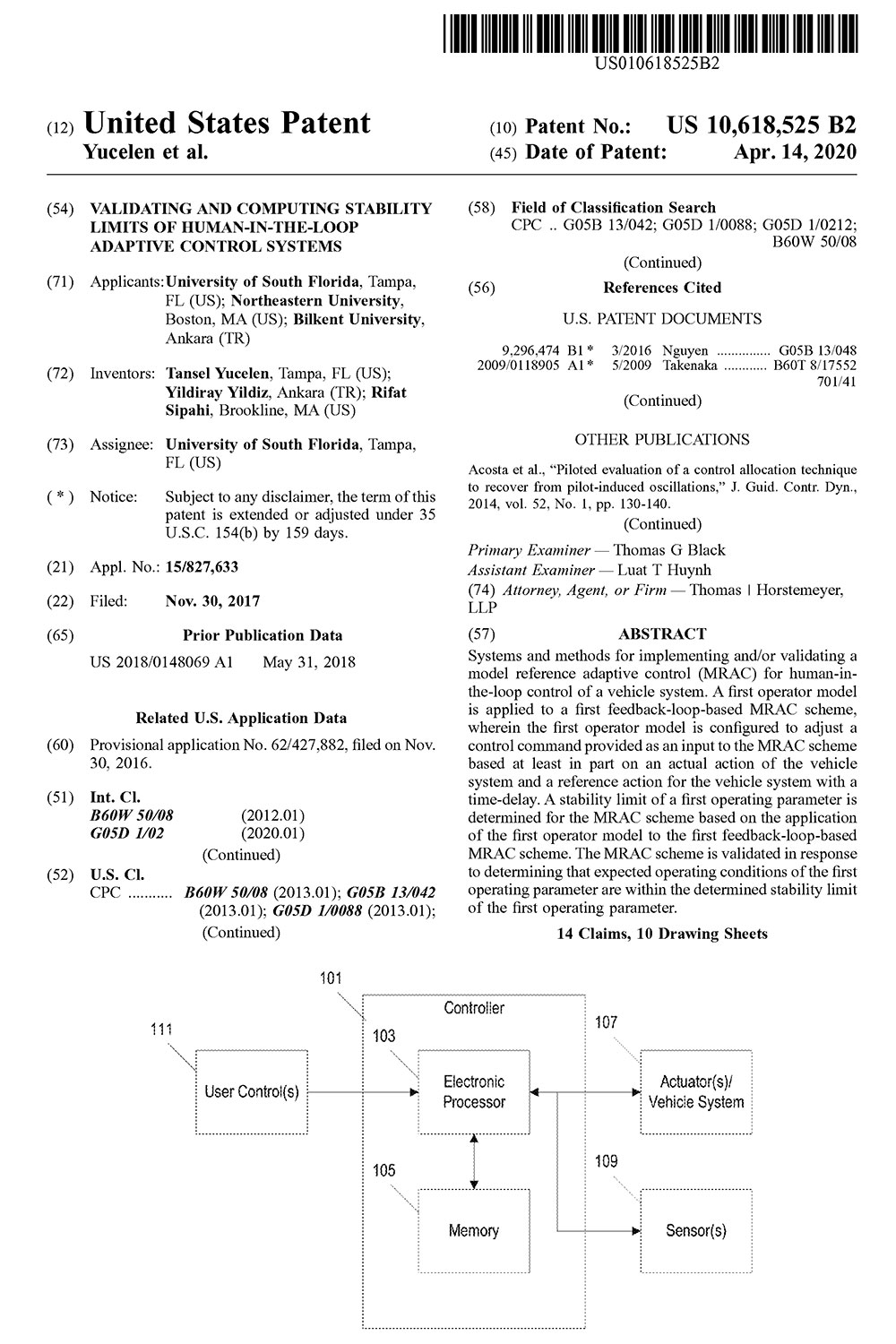
Systems and methods for implementing and/or validating a model reference adaptive control (MRAC) for human-in-the-loop control of a vehicle system. A first operator model is applied to a first feedback-loop-based MRAC scheme, wherein the first operator model is configured to adjust a control command provided as an input to the MRAC scheme based at least in part on an actual action of the vehicle system and a reference action for the vehicle system with a time-delay. A stability limit of a first operating parameter is determined for the MRAC scheme based on the application of the first operator model to the first feedback-loop-based MRAC scheme. The MRAC scheme is validated in response to determining that expected operating conditions of the first operating parameter are within the determined stability limit of the first operating parameter.