Capstone Students Design Robotic Boat To Combat Invasive Plant

Engineering capstone students built an autonomous robotic boat equipped with a hyperspectral camera to map the invasive hydrilla plant and help scientists control its spread in Connecticut waters. The project is a collaboration among the ECE and MIE departments, the Robotics and Intelligent Vehicles Research Lab, and the Connecticut Agricultural Experiment Station.
This article originally appeared on Northeastern Global News. It was published by Cesareo Contreras. Main photo: The Hydrilla Hunter is an autonomous robotic boat outfitted with a hyperspectral camera designed to detect and identify the invasive hydrilla plant. Photo by Matthew Modoono/Northeastern University
An invasive plant is strangling Connecticut’s waters, so these students developed a robotic boat to help fix it
As a native of Connecticut and a boater, Colin McKissick, is well aware of the invasive plant that is wreaking havoc in the state’s bodies of water.
Native to Australia, Africa and parts of Asia, the hydrilla plant found its way to Florida in the 1950s as it was used to bed aquariums since it doesn’t need much nutrition or light to grow.
Since then, hydrilla has been coined the “world’s worst invasive aquatic plant” as it spreads and grows rapidly and is difficult to control. The plant can now be found in many parts of the United States, but Connecticut has been hit particularly hard by the noxious weed.
A 2020 survey of the Connecticut River commissioned by the Connecticut River Gateway Commission found hydrilla in 200 acres in the river’s lower third. Its dense strands make it hard for native aquatic plants and marine life to thrive, and it often clogs boat propellers.
McKissick, a fifth-year Northeastern student, has experienced this firsthand while boating on the Connecticut River.
 |
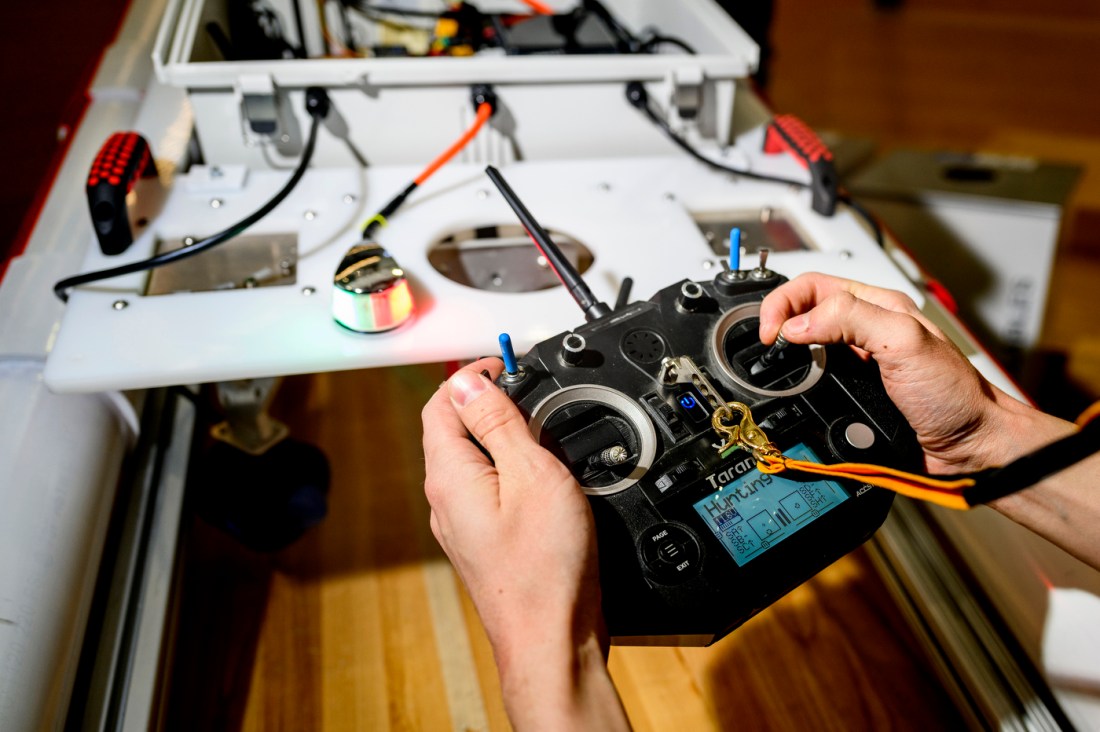 |
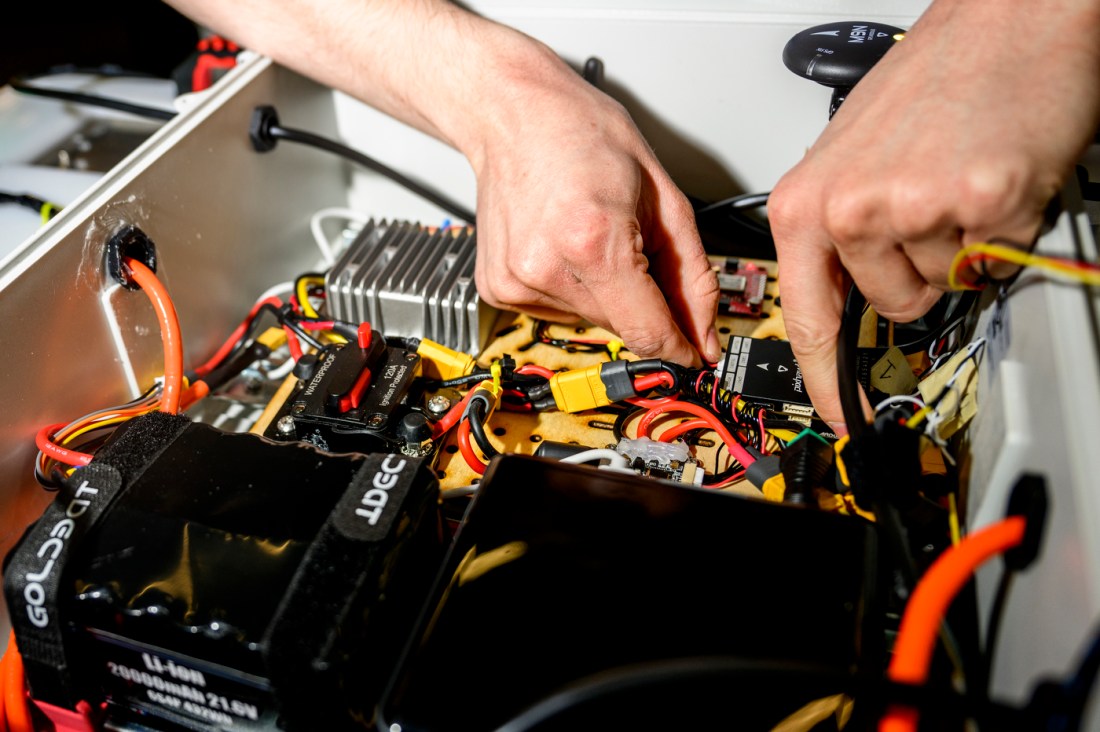
The robotic boat weighs 62 pounds, can travel at speeds of up to 1.3 miles per hour and can operate for 90 minutes on a charge. Photos by Matthew Modoono/Northeastern University
“Just going up on the river to get to the boat ports, a couple of times our propeller would get clogged up with the plant, which is wild because you wouldn’t expect a plant to gum up an 80-horsepower engine,” he says.
Enter the Hydrilla Hunter, an autonomous robotic boat outfitted with a hyperspectral camera designed to detect and identify the invasive plant.
McKissick helped develop the boat with a dozen other Northeastern engineering students as part of two capstone project classes.
The goal is to provide the boat to plant scientists at the Connecticut Agricultural Experiment Station to help them more quickly identify and survey where hydrilla can be found and stop it from growing further.
The project is a collaboration between the electrical engineering department, the mechanical engineering department, the Robotics and Intelligent Vehicles Research Lab and the Connecticut Agricultural Experiment Station.
Students working under Charles DiMarzio, associate professor of electrical and computer engineering, created the internals of the device, which include the imaging system, renewable battery and communication systems.
Students working under professor Randall Erb, associate professor of mechanical and industrial engineering, developed the housing and the boat’s navigation system.
“We came up with a solution to tackle this, which is to automate the detection of the hydrilla and notify the scientists of its location to extract it before it takes over the Connecticut water bodies,” says McKissick, who worked on the electrical and computer engineering side of the project.
So, how does the boat work?
Think of it like a three-step process.
First, the user pinpoints where on the map it would like the robot to go using a homebase system separate from the robot. As it hits those pinpoints, the robot scans the surface below for hydrilla. If it detects the presence of hydrilla, the user interface adds a pin to the location where the plant was detected.
The robotic boat weighs 62 pounds, can travel at speeds of up to 1.3 miles per hour and can operate for 90 minutes on a charge. It can either be controlled remotely or operate autonomously, explains Daniel T. Simpson, a fourth-year student who worked on the mechanical engineering side of the project.
Read full story at Northeastern Global News